Software
CALVIN’s source code was written entirely in the Arduino environment in C. CALVIN’s code allows him to function as a finite state machine, with different states corresponding to the different tasks CALVIN can complete. These states are detailed below.
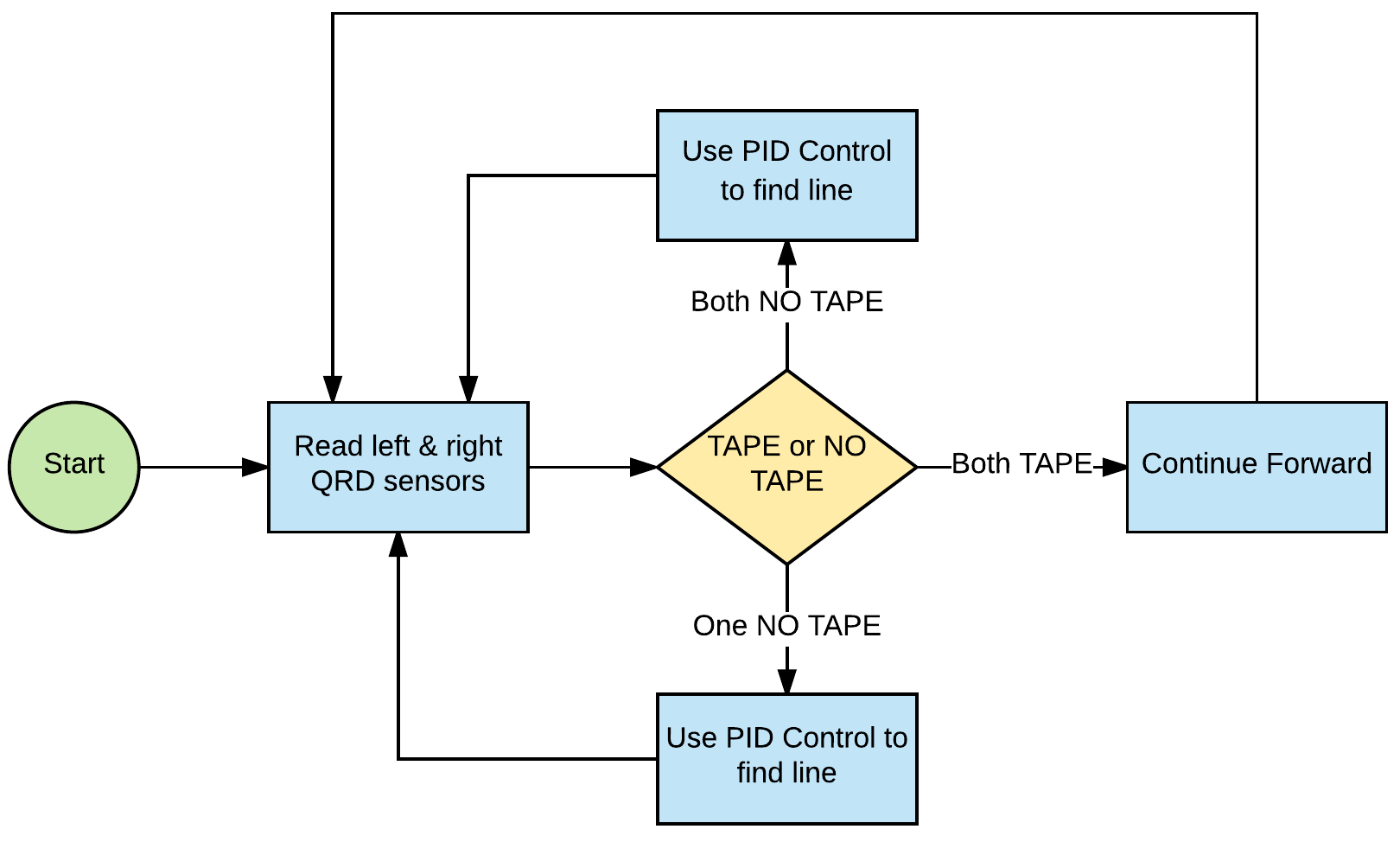
Line Follow
Line Follow is used for all parts of the course where CALVIN needs to line follow. This function reads the front inside QRD sensors to determine what direction CALVIN should move in.
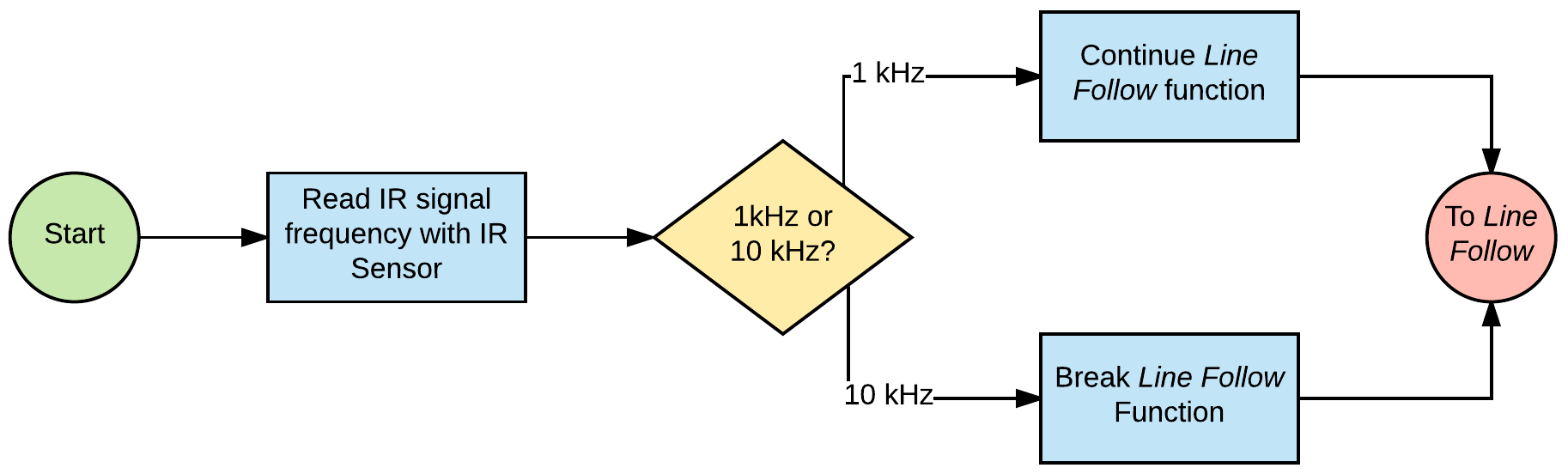
Check Alarm
Check Alarm is used when the CALVIN stops at the alarmed gate to read the IR beacon corresponding to the gate. This function compares two analog readings from IR filtering circuits for both 1kHz and 10 kHz signals, and CALVIN continues line following once this function returns a 1 kHz signal.
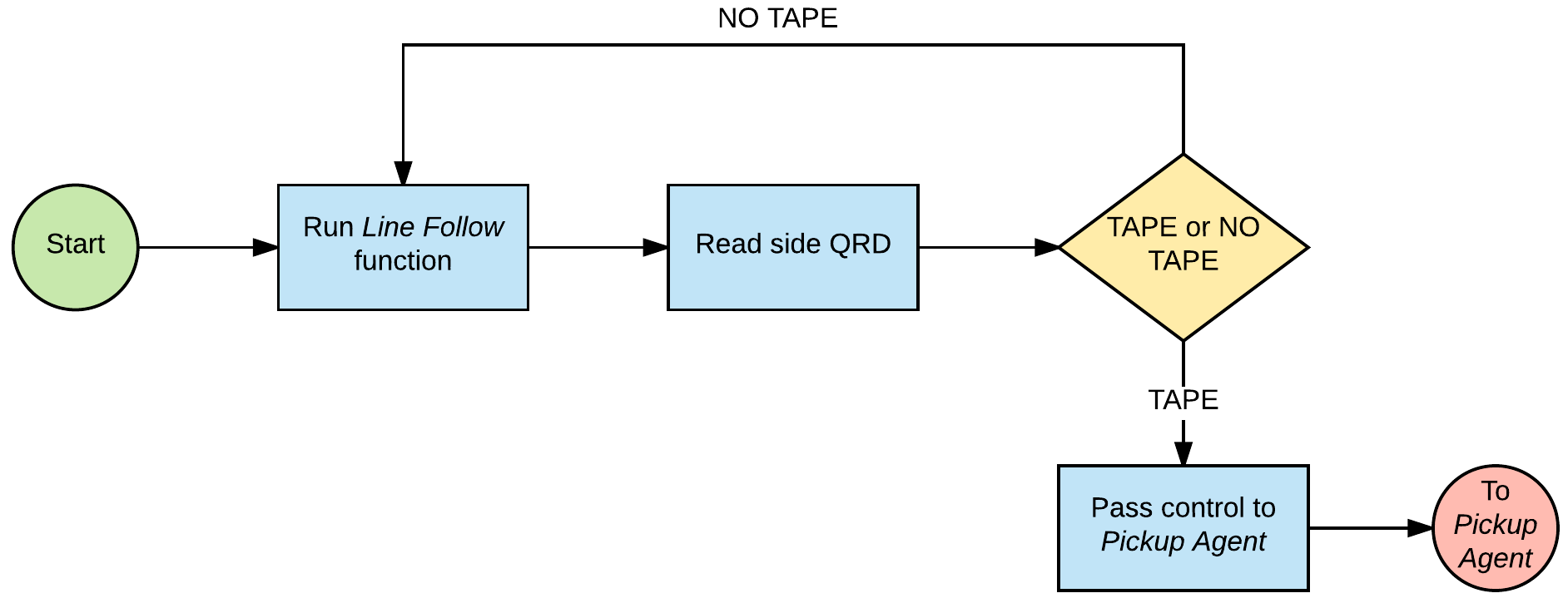
Circle Agents
Circle Agents is used when CALVIN enters the circle where agents are located and line follows around to pick them up. Circle Agents runs until a Stop Line is detected, and then stops and calls the Pickup Agent function.
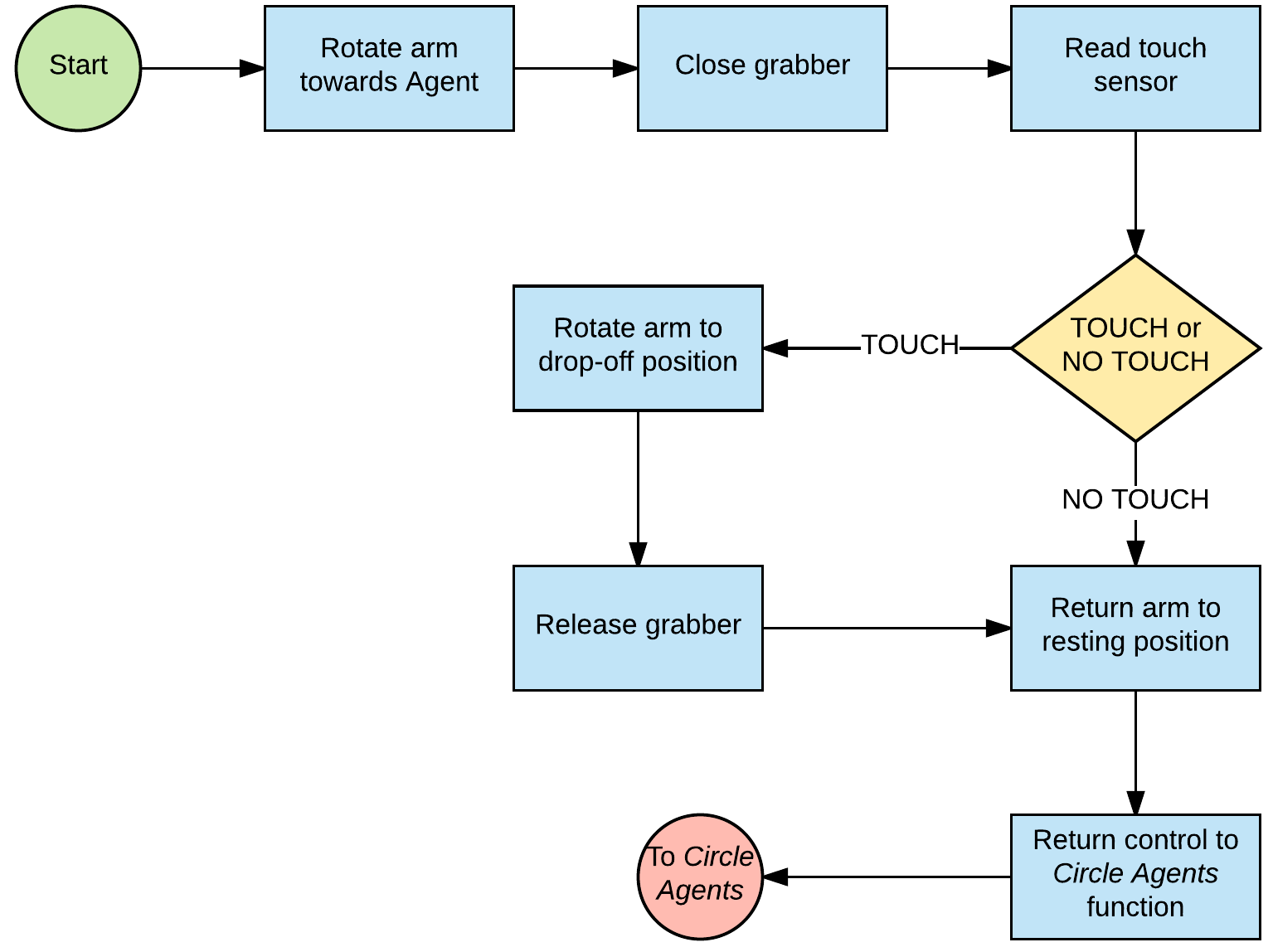
Pickup Agent
Pickup Agent moves CALVIN’s arm, claw, and crane in order to pickup an agent located on a platform. Once CALVIN has done this, the function returns to the Circle Agents function.
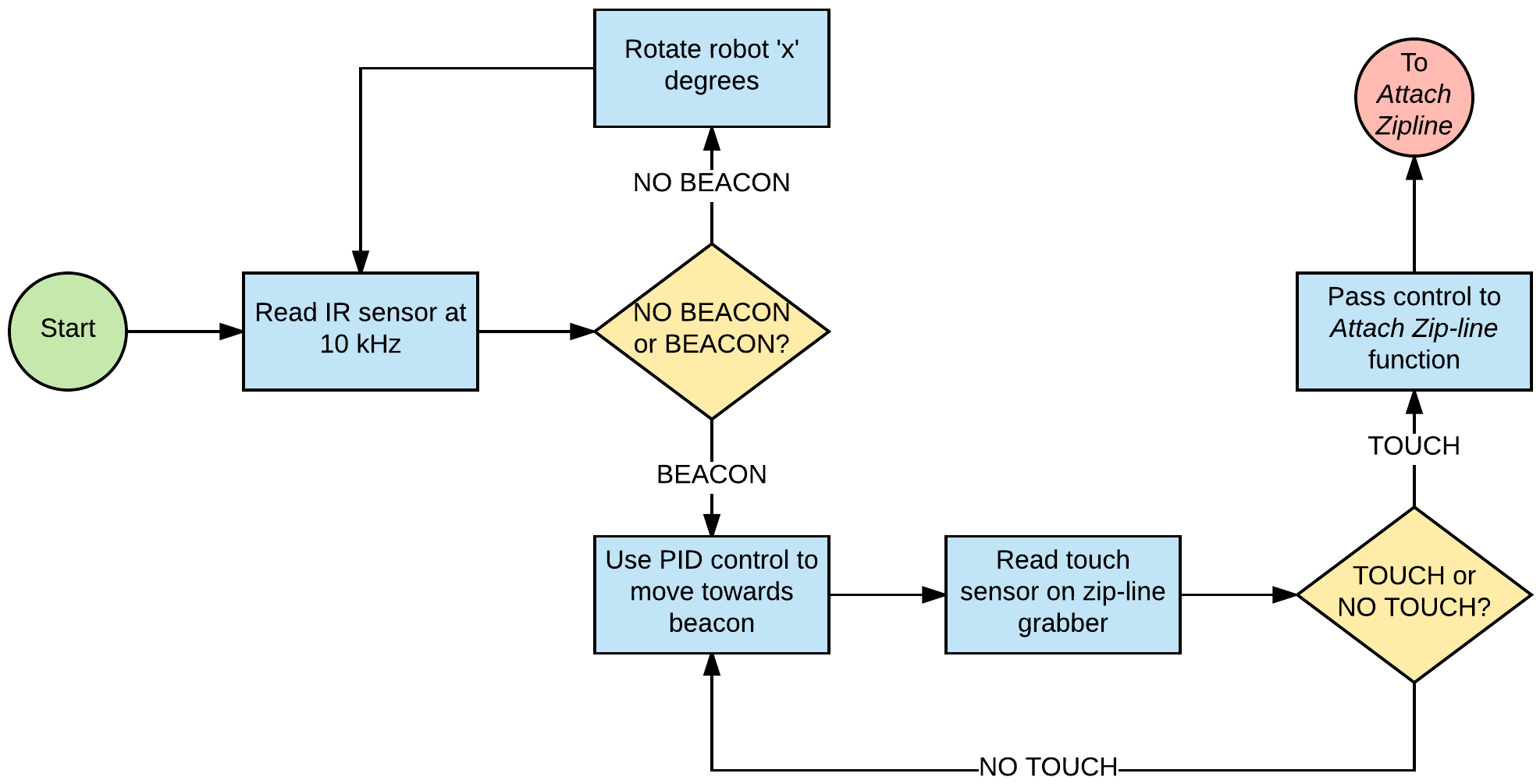
Find Zipline
Find Zipline is called by Circle Agents once all agents have been picked up. This moves CALVIN to the zipline in order to drop off the bag full of agents on thee zipline, then calls Attach Zipline.
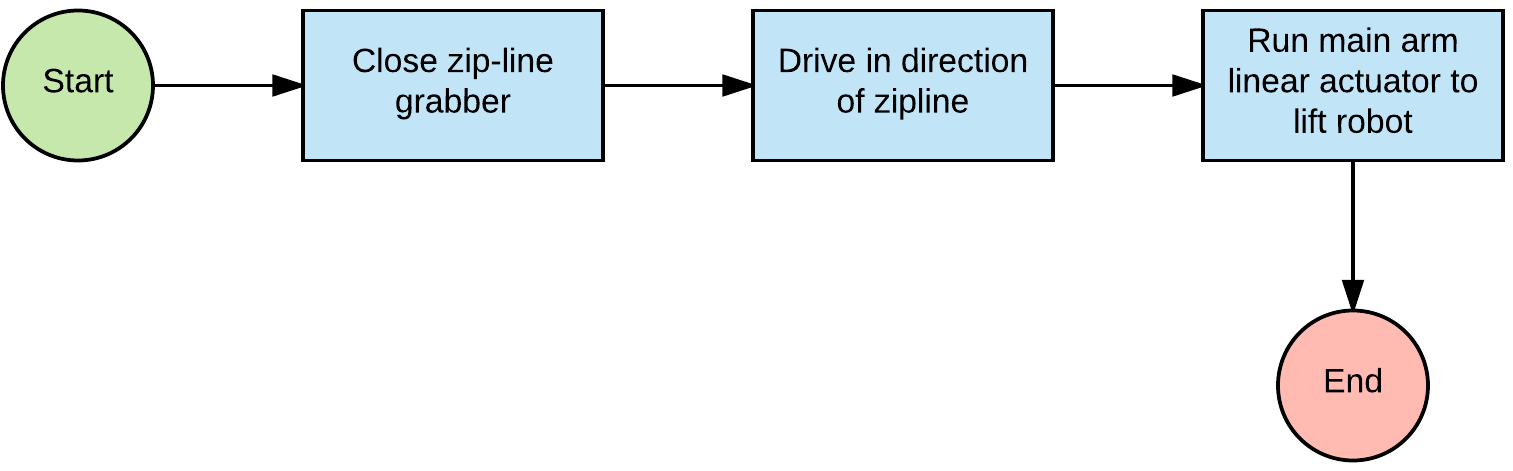
Attach Zipline
Attach Zipline makes CALVIN use his arm to lift the bag full of agents to the zipline, then lets go of the bag to complete the course.
Source Code
You can view CALVIN’s source code here.